| ACS Macro Letter发表中心学术副主任杨曙光课题组有关“高分子氢键复合物可驱动纤维”研究新进展 |
| 发布人:任振夏 发布时间:2020-11-14 |
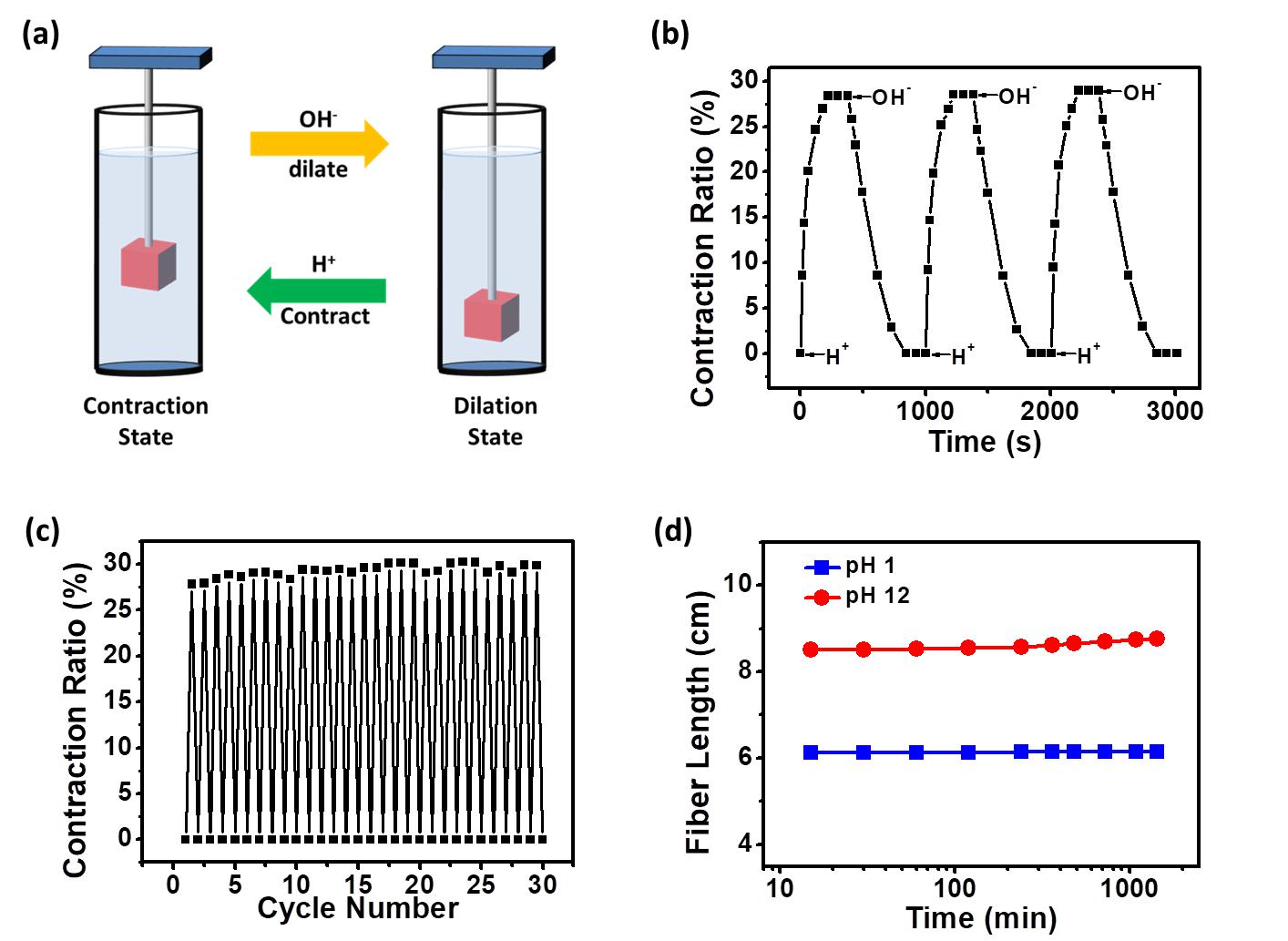
近日,ACS Macro Letter (2020, 9, 1507-1513)以“Polymer Complex Fiber for Linear Actuation with High Working Density and Stable Catch-State”为题发表了中心杨曙光教授课题组的最新研究进展。论文的第一作者为东华大学材料科学与工程学院博士生刘德中,共同作者包括东华大学博士后朱丽萍、博士生黄文弢、华南理工大学岳衎教授。论文通讯作者为东华大学杨曙光教授。 论文介绍了该课题组利用高分子复合物制备的具有线性驱动功能的高分子氢键复合物纤维。高分子复合物主要是指不同种类的高分子克服自身及与溶剂(主要是水)的相互作用,基于熵和焓的微妙平衡所形成的分子组装体系。高分子的复合过程,亦被广泛认为与生命起源相关,是研究无膜细胞器的模型体系。该研究通过模仿人体骨骼肌纤维制备了纤维状线性驱动器,在软体机器人、传感器和微型设备方面具有广泛的应用前景。当此类高分子纤维加载重物时,能够在pH变化的外界刺激下主动地提起/放下重物并做功(图1a)。这一驱动过程能够反复多次,并且保持稳定(图1b, c)。此外,悬挂重物到达驱动位置后,纤维的长度能够长久保持(图1d),实现类似软体动物肌肉纤维的“锁住状态(catch-state)”,即在不消耗能量的情况下维持应变状态。
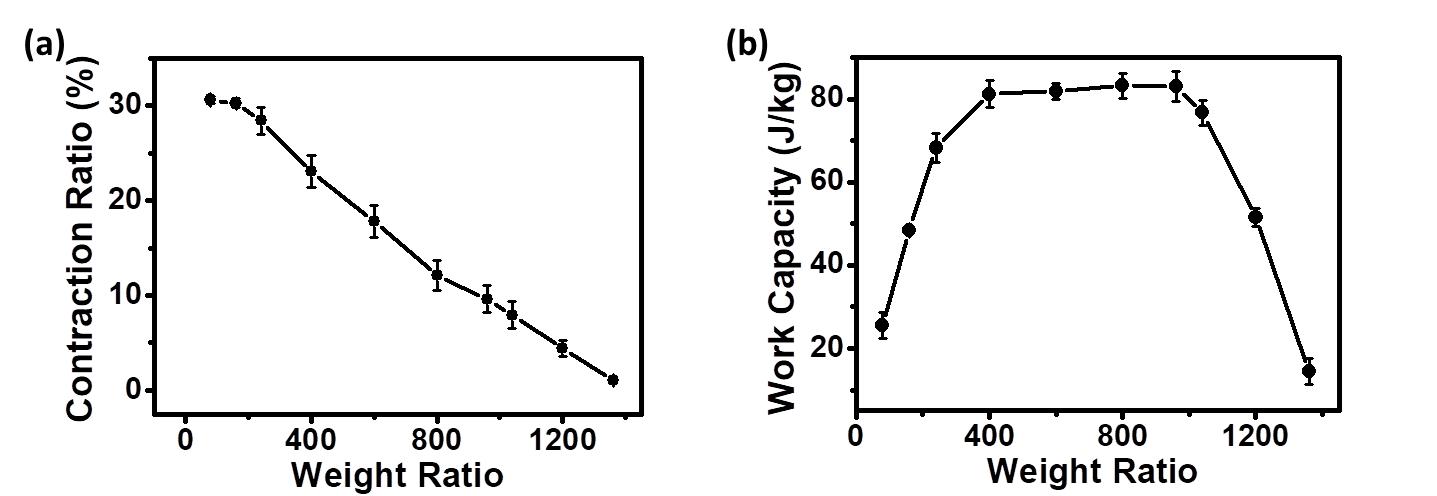
(图1. (a) PVA/PAA纤维状线性驱动器驱动过程示意图,驱动器的循环稳定性(b, c)和长度稳定性(d)。) 此种基于高分子纤维的线性驱动器可以提升超过自身千倍以上的重量(图2a),其最大工作密度可达80J/kg(图2b),是人骨骼肌纤维平均水平10倍的左右。
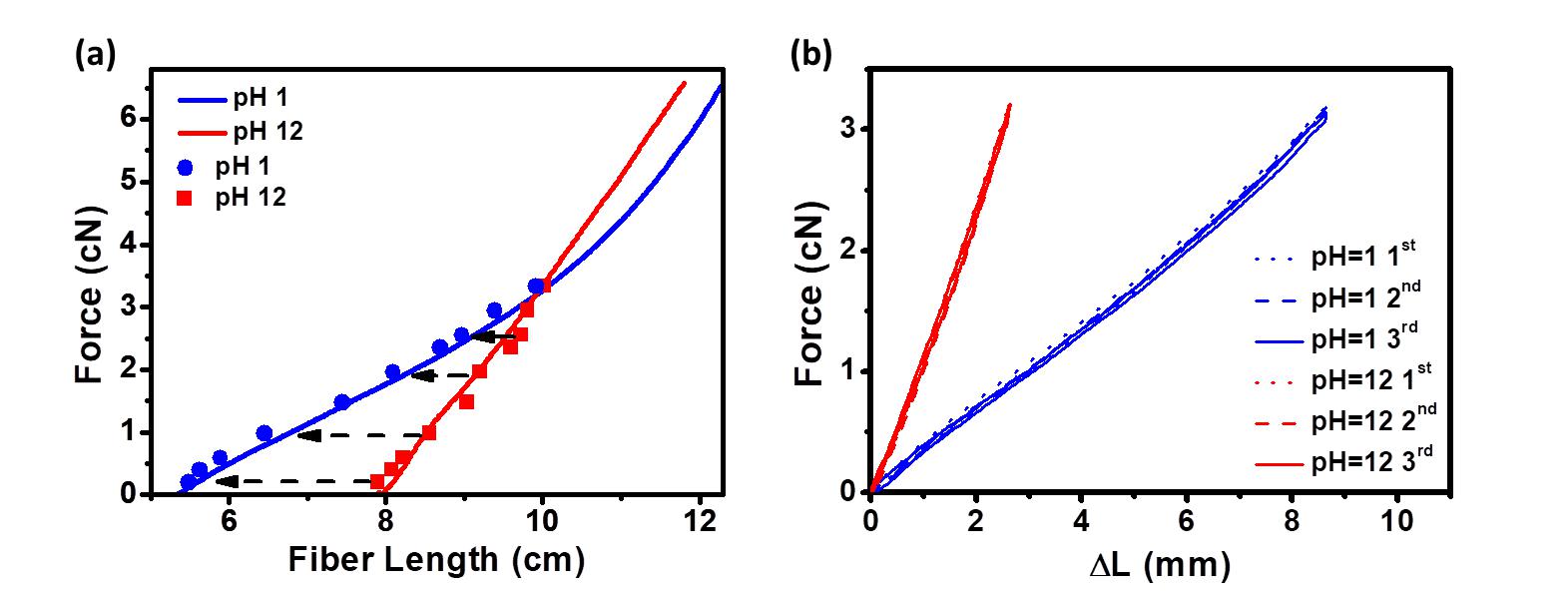
(图2. PVA/PAA纤维状线性驱动器的收缩率(a)和工作密度(b)。) 在碱性条件下,纤维平衡状态下的长度较长且模量较大;而在酸性条件下,纤维的平衡长度较短且模量较小。因此,对重物的提拉行为发生在纤维由伸长状态向收缩状态转变的过程中。纤维在碱性条件和酸性条件拉伸的交点,是纤维载重驱动的极限值(图3a)。通过测试发现,此种纤维在驱动范围内的弹性回复率可达将近100% (图3b),其拉伸和回复曲线几乎重合,纤维表现出线性弹性行为,从而使其具有稳定的“锁住状态(catch-state)”特性。
(图3. PVA/PAA纤维状线性驱动器的拉伸和弹性回复测试) 据悉,杨曙光教授课题组长期致力于研究自适应纤维体系,以大分子复合物为切入点,利用精密加工和分子组装技术,将复杂软物质体系制备成为纤维材料,以期实现类似肌肉纤维和神经元纤维的感知响应和智能驱动行为,获得可以与生命体系交互的纤维材料。课题组近年来设计并搭建了满足高分子复合物制备条件的小型装备,通过多种适合的方式抑制高分子链间的相互作用获得可纺丝流体,当纺丝流体通过喷丝孔后,利用外界环境的变化,寻求重构高分子链间相互作用的机制,并使高分子复合物纤维原位凝聚成形。 课题组自2016年起发表的系列代表性研究论文有:(1)设计制备具有高弹性的氢键复合纤维,通过高分子链间氢键有效抑制柔性链的结晶,并提供动态的交联性,赋予此类纤维同时具备高倍拉伸和良好的回弹性(ACS Macro Lett. 2016, 5, 814−818);(2)设计制备具有结构层次的氢键复合物纤维(Chin J. Polym. Sci. 2017, 35, 1001-1008);(3)利用高分子氢键复合作用,制备具有良好导电性能的纤维(Materials Today Communications 2019,19,425-432);(4)设计并制备了兼具高弹性、导电性和自修复性氢键复合物纤维,可用于应力的传感(Adv. Fiber Mater. 2019, 1, 71– 82);(5)设计制备了高分子静电复合物纤维,阐明了静电复合的自适应性以及湿度变化下的力学转变(ACS Appl. Polym. Mater. 2020, 2, 2119−2125) 。基于上述研究成果,课题组受邀发表相关综述论文,从不同角度总结展望大分子复合纤维的研究前景(高分子学报 2018, 445-455;Science China-Technological Sciences 2019,62,931-944)等。 此项工作得到了国家自然科学基金(51973029)和纤维材料改性国家重点实验室的资助。
(撰稿:朱丽萍、刘蕾) |